该算法将点划分为方形单元格,以便每个点位于一个单独的单元格中。在第一步中,根据输入点文件或点云中点的顺序,从第一个单元格中获取第一个点。
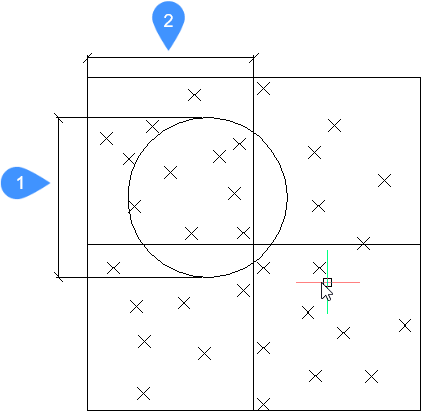
在第一个点周围,检查所有相邻点是否满足条件 ∆h(高程差)。给定半径内的所有点,包括相邻单元格中的点,都被视为相邻点(见下图)。
当排除所有值高于用户定义值的 ∆h 的点时,所描述的过程将继续用于第一个单元格中的下一个点。然后,该过程继续对相邻单元格中 x 坐标方向的所有点进行,依此类推,直到最后一个单元格。
- 简化步骤的半径
- 简化步骤的半径
该算法会自动建议简化半径步长参数的值。它通过根据给定的输入点计算边界框来实现这一点。然后,它采用尺寸 ∆x 和 ∆y(长度和宽度)中的较大者。计算所获得值的 0.5%,将其四舍五入并显示为用户建议的值。
较大的像元尺寸(即简化半径步长参数)会降低最终 TIN 表面的精度。为了提高简化的 TIN 网络的精度,输入较小的像元尺寸更有意义。