命令:PointCloud, PointCloudAttach, PointCloudBoundary, PointCloudColorMap, PointCloudCrop, PointCloudPointSize, PointCloudPointSize_Minus, PointCloudPointSize_Plus, PointCloudPointMax, PointCloudPreprocess, PointCloudUncrop, PointCloud2dVsDisplay
概述:在本文中,您将学习如何使用点云。
使用预处理将数据准备为正确的格式。
将准备好的数据附加到图形上。
使用带有点云的图形,例如作为蓝图开始图形。
前处理
支持的文件类型: .las .pts .ptx。
为了能够快速导航大点云数据集,必须对其数据进行预处理。使用命令POINTCLOUDPREPROCESS。这将打开一个文件对话框,可让您选择输入点云。
下一步是选择预处理输出文件的名称。默认情况下,文件对话框建议输入文件的名称相同(扩展名前没有数字)。此名称可以修改。文件类型为.bpt。
对于AutoCAD®用户:这相当于在Recap中创建.rcp文件。
附加到工程图
使用命令POINTCLOUDATTACH将预处理的.bpt文件附加到当前.dwg文件。
注意:点云不能附加到空模板。.dwg必须首先保存。这是因为附着点云使用相对路径。
...
选项有:
插入点
规模
旋转
当勾选“指定在屏幕上”被选中,插入框将显示,让用户确定平移/旋转/缩放,同时将点云放置在图纸上。对于其他选项,将使用对话框中的值。
过程:在.dwg中操纵点云
一旦附加了点云,便可以像其他实体一样对其进行操作。使用Quad菜单移动/旋转/缩放。它还响应剖面。
使用命令SECTIONPLANE隐藏截面平面之外的部分。
注意:剖面具有三种状态:
平面:将所有内容都修剪到平面的一侧。
边界:定义屏幕上绘制的轮廓的无限挤出。
体积:与边界相同,但具有给定的顶部和底部平面。
图2:带有剖面的点云(内部蓝色长方体)。红色:剖面平面“属性”面板。剖面平面状态设置为“体积”。
捕捉到云中的可见点也是可能的。打开端点和/或中点,以捕捉到点云上的点。
图形资源管理器
图3:点云的图形资源管理器示例。
图形资源管理器还支持点云,尤其是附加到dwg的点云定义。当接收到无法在计算机上正确引用路径的dwg和点云时,可以在此处调整该点云的路径。可以通过图形化菜单或命令PointCloud找到图形资源管理器。
属性面板
图4:THCAD中的点云。左红色显示点云“属性”面板。选择点云时,将显示此面板。
单击(并因此选择)点云时,其属性在属性面板中变为可用。从那里,也可以调整插入点,旋转,缩放,色彩图等属性。
其他功能
- 颜色地图(POINTCLOUDCOLORMAP):假颜色可以分配给对应于强度或高程的点。选择单一光谱的颜色,例如红色或蓝色,或选择整个光谱。
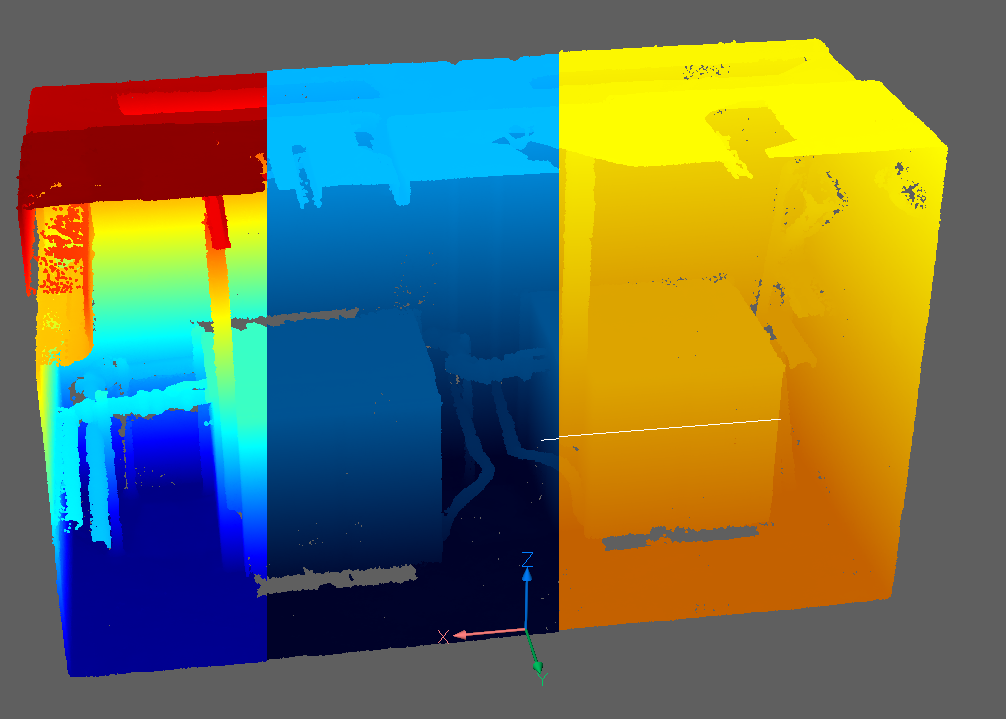
图5:在点高程函数中的颜色地图的一些示例。左侧有 光谱”色图;中间部分为“ 水”色图,右边部分为“ 泥土”色图。
裁剪(POINTCLOUDCROP):仅裁剪当前点云,而其他实体不受影响。剖切面会裁剪场景中的所有内容。
点大小(POINTCLOUDPOINTSIZE):更改点的显示大小。(可以有效地填补空白。)
显示的最大点数(POINTCLOUDPOINTMAX):更改显示的最大点数。由于计算机屏幕只有几百万个像素,所以同时显示数十亿个点毫无意义。此参数设置要在屏幕上的任何给定实例上显示的点数的最大值。毫无疑问,实际的点云可以比这个大很多倍(很容易达到几亿点甚至更多)。
边界(POINTCLOUDBOUNDARY):显示或隐藏点云边界框。

图6:点云已被剖切,左图显示了带边界的点云,而右图显示了无边界的点云。
AutoCAD®兼容性
...
点云扫描到BIM半自动工作流程包括四个步骤:
1. 检测楼层
使用POINTCLOUDDETECTFLOORS命令来检测这些楼层。每个选定点云中分配一个楼层编号。
2. 检测房间
使用POINTCLOUDDETECTROOMS命令来检测房间。每个点云中选定的点都会分配一个房间号。
3. 生成室内实体
使用POINTCLOUDFITROOMS命令,基于之前找到的房间创建房间实体。
4. 创建BIM组件
使用BIMINVERTSPACES命令,在选定的实体、墙体开口、外墙和板块之间创建墙体。
注意:该工作流程适用于有法向量信息的点云。
对于结构化点云数据,法向量是在点云预处理时计算的。如果点云在较旧的BricsCAD®版本中预处理过且法线尚未计算,请先使用POINTCLOUDNORMALS命令。
对于非结构化点云数据,如果有,通常会导入法向量信息,并用于工作流程。否则,它不会被计算,工作流程也无法适用。
注意:普通向量计算需要用HSPC格式处理点云。POINTCLOUDHSPC 和 POINTCLOUDNORMALS 系统变量都需要设置为 On(默认为 On)。
检测楼层
扫描到BIM工作流程的第一步是检测附着在图纸上的点云中的地板和天花板。
注意:想了解更多关于点云附加的信息,请参阅POINTCLOUDATTAT命令和POINTCLOUDREFERENCE命令相关文章。

- 启动POINTCLOUDDETECTFLOORS命令。
提示您:选择点云实体:
- 选择附着在图纸上的点云。
提示提示:在全点云上作还是选择?
- 执行下列作之一:
- 点击全功能即可作完整的点云。
- 点击选择,指定选区矩形的第一个点,然后是对面点。
提示提示:创建空间元素?
- 选择“是”以根据检测到的楼层高度创建空间元素。
- 命令行会弹出一条消息,告知楼层检测过程准备好。
该命令将检测选定点的楼层。楼层在点云管理器面板的建筑下列出。
- (可选)要编辑分配给楼层的点选择,请在点云管理器面板中右键点击该楼层,然后从右键菜单中选择修改选项。
检测房间
扫描到BIM工作流程的第二步是检测楼层中的房间。
- 启动POINTCLOUDDETECTROOMS命令。
提示提示:指定楼层ID或全部选择。
- 执行下列作之一:
- 点击“全部”以检测Point Cloud Manager面板中列出的所有楼层的房间。
- 点击ID以检测指定ID楼层的房间。
- 该命令启动后台处理。根据点云的大小,这可能需要几分钟。
注意:你可以在背景处理期间继续工作。
后台处理结束后,弹出一条消息。指定楼层中的点被归类为不同的房间。检测到的房间会在点云管理器面板的建筑下列出,每个房间都有ID。
要检查房间是否正确检测,请在房间名称旁开关房间可见状态图标。
选择一个房间并右键单击以访问上下文菜单。选择编辑以通过拖动多段线点来调整房间的轮廓,然后从房间的上下文菜单中选择接受或拒绝。如果需要,请使用“重命名”或“删除”选项。通过选择列表中的房间并使用上下文菜单中的合并来合并多个房间。
要向楼层添加新房间,请在点云管理器面板中右键单击楼层名称,选择添加房间并绘制多段线以定义新房间的边界。

将选择中的点分类到不同的房间后,您可以根据此分类创建实体。
创建室内实体
扫描到 BIM 工作流程的第三步是根据检测到的房间创建房间实体。
- 启动 POINTCLOUDFITROOMS 命令。
系统将提示您:指定建筑物 ID 或全选。
- 执行下列作之一:
- 单击“全部” 为所有检测到的房间创建实体。
- 单击 Id 为检测到的房间创建具有指定 ID 的实体。
系统提示您:将检测限制在垂直 (90°) 壁上?
- 如果房间有两个垂直的墙方向,请选择是。
该命令启动后台处理。根据点云大小和墙壁方向,这可能需要几分钟的时间。
注意:你可以在背景处理期间继续工作。
后台处理完成后,将弹出一条消息。创建的实体将分配给自动生成的房间图层。

4. 关闭附加点云的可见性。房间实体现在可见。

或者,您可以使用 DMPUSHPULL 命令来编辑房间,以调整所创建实体的面。
创建BIM组件
扫描到 BIM 工作流程的最后一步是在先前创建的实体和外壳之间生成墙。
- 选择将在其上创建 BIM 组件的图层。
- 启动 BIMINVERTSPACES 命令。“反转空间命令上下文”面板将打开,用于定义设置。有关每个选项的详细信息,请参阅文章 BIMINVERTSPACES 命令。
- 单击应用。
扫描到 BIM 工作流程现已完成,基于点云的 3D 模型已完全生成。

接下来,您可以验证和编辑结果:
- 关闭在其上创建房间实体的图层。
- 使用 BIMSECTION 命令创建显示内墙的水平剖面。
- 使用墙编辑工具,如LCONNECT或BIMEXTEND命令,根据需要调整结果。
