命令: MANIPULATE
该操纵器是一种多功能抓握工具,可快速移动,旋转,缩放和镜像选定的实体。在开始操作时按住Ctrl键将保留原始实体,从而创建副本。选择实体后,将在用户控制的位置和方向上显示操纵器。位置和方向的控制方式与动态UCS相似。当同时选择多个实体时,操纵器最初将放置在其几何中心。当逐步建立选择时,将保留机械手的初始位置。机械手可以使用其手柄轻松直接地移动到任何所需的位置或方向。
根据操作类型以及是否激活了动态尺寸,可以使用动态输入字段来设置距离,角度或比例因子。 MANIPULATE
该操纵器是一种多功能抓握工具,可快速移动,旋转,缩放和镜像选定的实体。在开始操作时按住Ctrl键将保留原始实体,从而创建副本。选择实体后,将在用户控制的位置和方向上显示操纵器。位置和方向的控制方式与动态UCS相似。当同时选择多个实体时,操纵器最初将放置在其几何中心。当逐步建立选择时,将保留机械手的初始位置。机械手可以使用其手柄轻松直接地移动到任何所需的位置或方向。
根据操作类型以及是否激活了动态尺寸,可以使用动态输入字段来设置距离,角度或比例因子。
自适应捕捉步骤
如果SNAPTYPE = 2,则捕捉步长将自动适应当前屏幕的缩放系数。AdaptiveGridStepSize SETTING控制最小的可用步长。自适应步长由操纵器标尺使用,它可以使用精确的值快速修改实体,而无需键入数字。
机械手设置
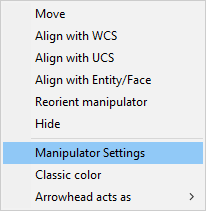
要在“设置”对话框中显示操纵器设置,请执行以下操作:要在“设置”对话框中显示操纵器设置,请执行以下操作:
右键单击操纵器。
在上下文菜单中选择“操纵器设置”。

姓名
标题
描述
机械手
机械手
控制操纵器小部件的显示。
0:不显示机械手。
1:无论何时选择实体,都显示操纵器。
2:如果按下鼠标左键的时间超过MANIPULATORDURATION(默认值)的当前值,则显示操纵器。
操纵时间
机械手持续时间
指定在实体选择期间应按下鼠标左键多长时间以触发操纵器的显示。该值以毫秒为单位。
机械手尺寸
机械手尺寸
指定相对于默认值的操纵器大小。可接受介于0.5和2.0之间的值。
机械手手柄 机械手手柄
指定操纵器的锚柄的行为。
0:手柄移动操纵器本身(默认)。
1:手柄自由移动选定的实体。
机械手颜色主题 机械手颜色主题 指定操纵器的颜色主题。
0:单色(默认)。
1:经典色彩主题。
AdaptiveGridStepSize
自适应网格步长
为SNAPTYPE系统变量的“自适应网格捕捉”模式设置捕捉间隔(以像素为单位)。可接受2到100之间的值。
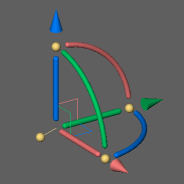
机械手布局
检查机械手上下文菜单中的“经典颜色”选项以获取经典布局。取消选中默认布局的选项。
|
|
默认 | 经典的 |
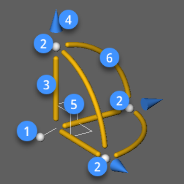
4把
- 1:机械手手柄
- 2:轴柄
12个命令触发区:
- 3:轴
- 4:箭头
- 5:平面色板
- 6:旋转弧
...
3D机械手三脚架的初始位置和方向取决于:
- 实体类型。
- 您单击实体的点。
实体类型 | 选择点 | 机械手 | |
锚点 | 方向 | ||
线 | 近端点 | 在端点 | X轴穿过另一个端点 |
接近中点 | 在中点 | 通过最近端点的X轴 | |
折线 | 顶点附近 | 在顶点 | X轴穿过所选线段的另一个顶点 |
近段中点 | 在细分市场中点 | X轴通过最近的顶点 | |
折线 | 在弧段上 | 在弧中心 | X轴通过最近的顶点 |
弧 | 随机的 | 在弧中心 | 通过最近端点的X轴 |
圆圈 | 随机的 | 在圆心 | X轴与当前坐标系的X轴平行 |
花键 | 随机的 | 在最近的端点 | 通过另一个端点 |
地区 | 在线段上 | 在线段的最近端点 | X轴穿过另一个端点 |
在弧段上 | 在弧段的中心 | X轴通过弧段的最近端点 | |
文字,多行文字 | 随机的 | 在实体的原点 | 实体旋转角度的X轴。 |
3D实体* | 固然的脸上 | 在最近的顶点 | 沿最近边缘的X轴 所选面中的XY平面。 |
多个实体 | 随机的 | 在选择集的几何中心** | 与当前坐标系的轴平行 |
*请参阅选择模式以了解如何选择3D实体面或整个实体。请参阅选择模式以了解如何选择3D实体面或整个实体。
**当将更多实体添加到选择集中时,操纵器的位置不会改变。
...
- 逐个选择实体或使用窗口选择,然后单击以选择最后一个实体
- 将MANIPULATOR系统变量的值设置为1:将MANIPULATOR系统变量的值设置为1:选择实体时显示操纵器。
- 组成选择集,然后启动MANIPULATE命令。组成选择集,然后启动MANIPULATE命令。
重新安置机械手
移动机械手
请执行以下任一操作:
- 长时间单击操纵器上的任意位置,然后将其移动到新位置*。
- MANIPULATORHANDLE = 0:单击机械手手柄(1),然后将其移动到新位置*。
锚固手柄突出,可避免与实体抓手重叠。 - MANIPULATORHANDLE = 1:长按机械手手柄(1),然后将其移动到新位置*。
- 将光标放在操纵器上,然后右键单击并在上下文菜单中选择“移动”,然后将其移动到新位置*。
...
- 与WCS对齐:机械手的轴被迫平行于世界坐标系的相应轴。
- 与UCS对齐:如果UCS当前是活动坐标系,则将操纵器轴强制平行于UCS的相应轴。
将操纵器与实体的表面对齐
动态UCS(DUCS)必须打开才能成功执行此操作。动态UCS(DUCS)必须打开才能成功执行此操作。
将光标放在操纵器上,然后右键单击并在上下文菜单中选择“移动”。
将鼠标悬停在实体的表面上。
机械手的XY平面与光标下方的实心对齐。请执行以下任一操作:
捕捉到所选面或其边缘之一上的点。
按下Shift键,将XY平面锁定到选定的面,然后捕捉到面外的点。