命令:点云,PointCloudAlign, PointCloudAttach, - PointCloudAttach,PointCloudColorMap,PointCloudCrop, PointCloudCropSolid,PointCloudDeleteItem,PointCloudDetectFloors,PointCloudExport,PointCloudFitPlanar,PointCloudImport,PointCloudPointSize,PointCloudPointSize_Minus,PointCloudPointSize_Plus,PointCloudPointMax,PointCloudPreprocess, -PointCloudPreprocess,PointCloudProjectSection,PointCloudReference,PointCloudShowBubbles,PointCloudUncrop
BricsCAD v21 中的点云功能明显更快、更强大,并且在 BIM 许可下更加强大。
预处理
E57 文件格式被添加到支持的文件中进行预处理。
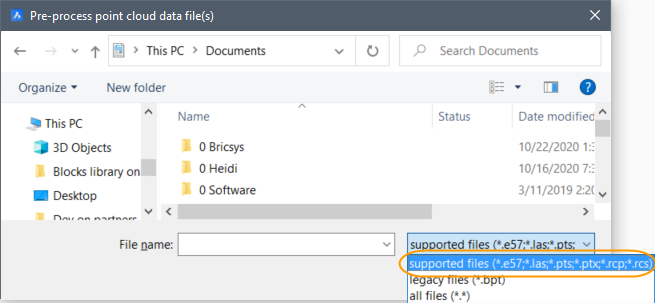
当您附加需要预处理的点云时,它在 BricsCAD v21 中的转换速度比在 v20 中快 5 到 8 倍。显示屏底部的进度表显示转换进度。

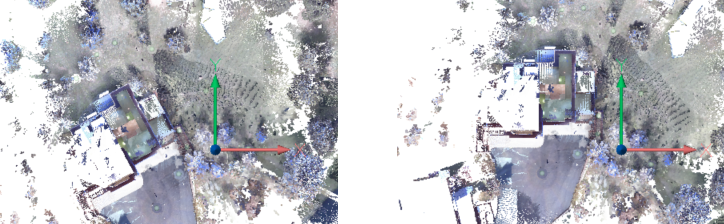
结盟
新的 POINTCLOUDALIGN 命令会自动旋转点云以使其与 X 轴和 Y 轴最佳对齐。为了确定最佳对齐方式,它可以分析整个点云,或者您可以指定最相关的区域。
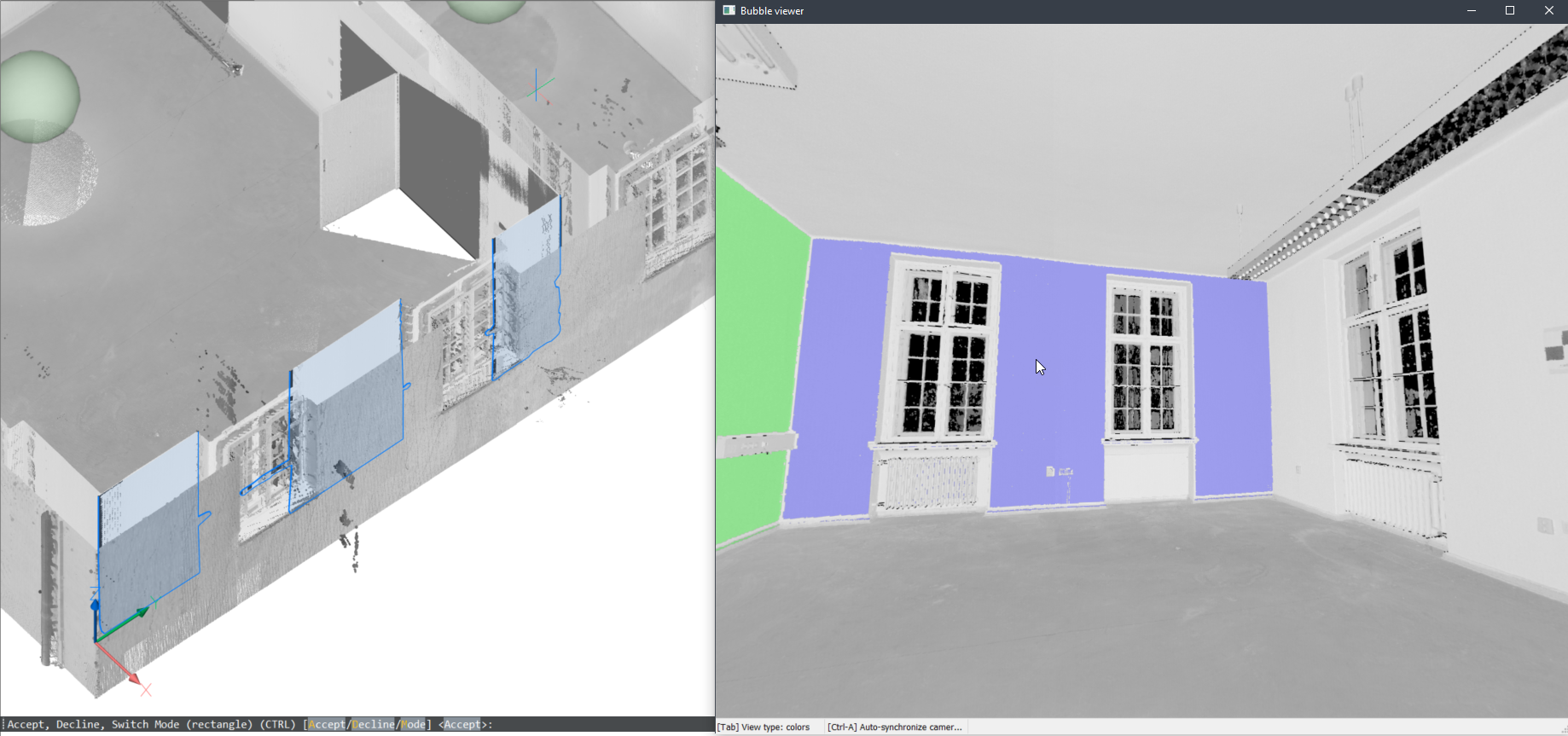
气泡查看器
点云在所有扫描位置显示气泡。在这些位置,您将体验到最真实的视觉表现。
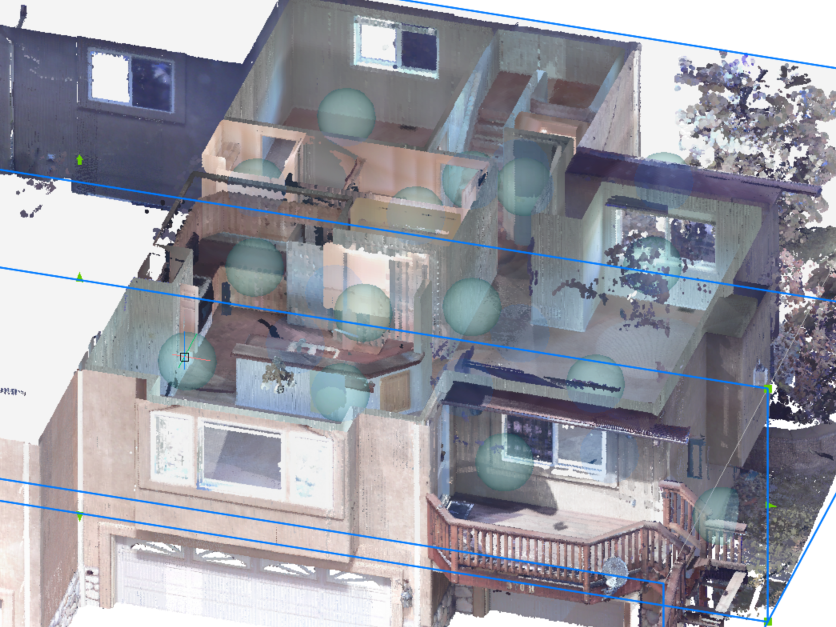
双击模型空间中的气泡之一以打开气泡查看器。您可以按下鼠标中键并移动鼠标以从该扫描位置的任何方向查看点云。

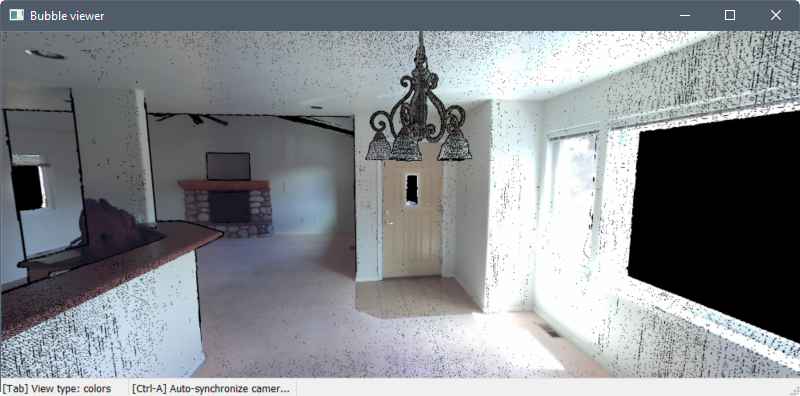
按 Tab 键可在三种不同的视觉模式之间循环。
第一种模式将点显示为其实际颜色或灰度,具体取决于数据的扫描方式。

第二种模式根据它们的法向量将点显示为红色、绿色或蓝色。颜色对应于 UCS 轴。
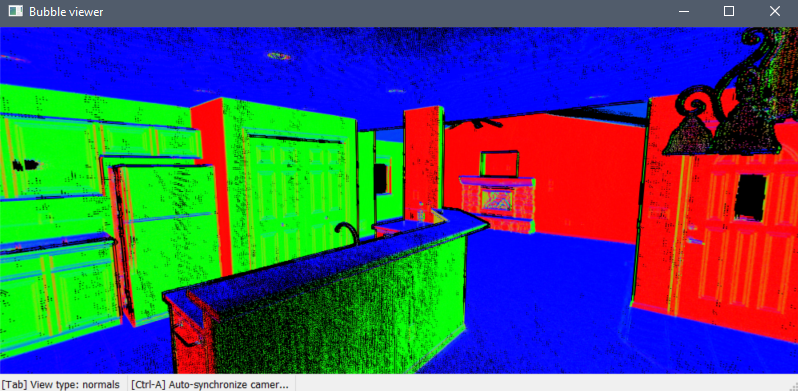
第三种模式随着与扫描位置的距离增加而显示从亮到暗的点。

您可以通过按 Ctrl A 轻松同步绘图视图以匹配气泡查看器。

实体捕捉
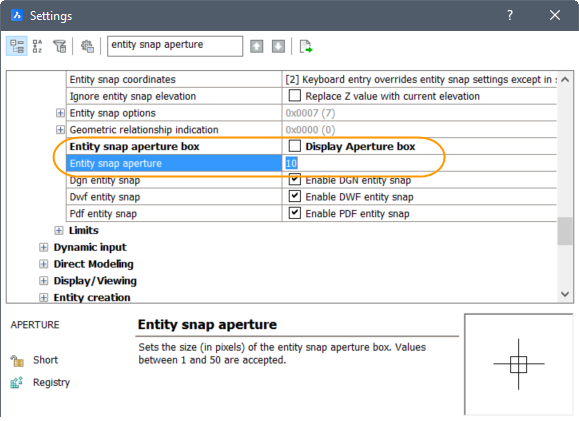
新的点云最近点实体捕捉显着提高了您选择相关点云点的能力。它使用从当前视点朝向光标的假想圆柱体。
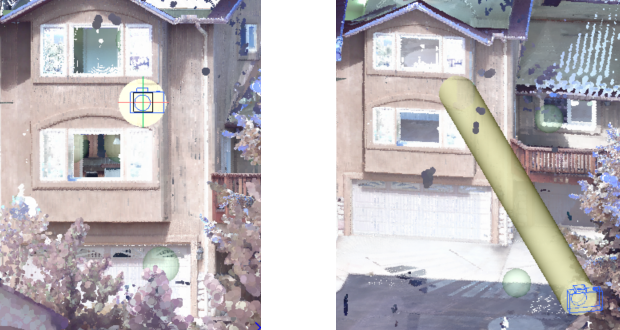
假想圆柱体的半径由实体捕捉孔径框设置定义。
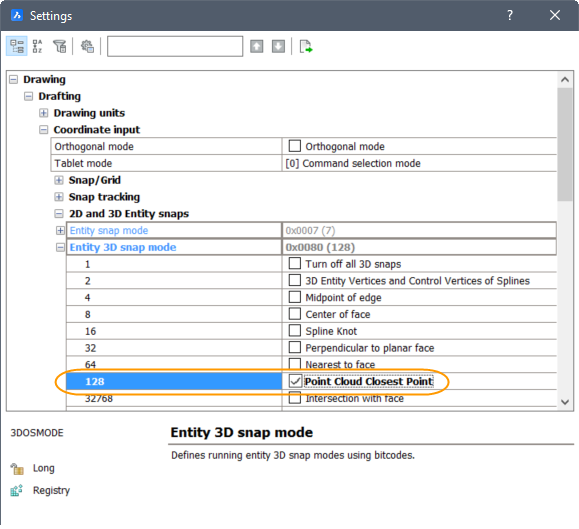
在实体捕捉菜单、工具栏和设置中启用新的点云最近点实体捕捉以及其他 3D 实体捕捉。
出口
新的 POINTCLOUDEXPORT 命令允许您将点云的裁剪选择导出到 .pts 文件。
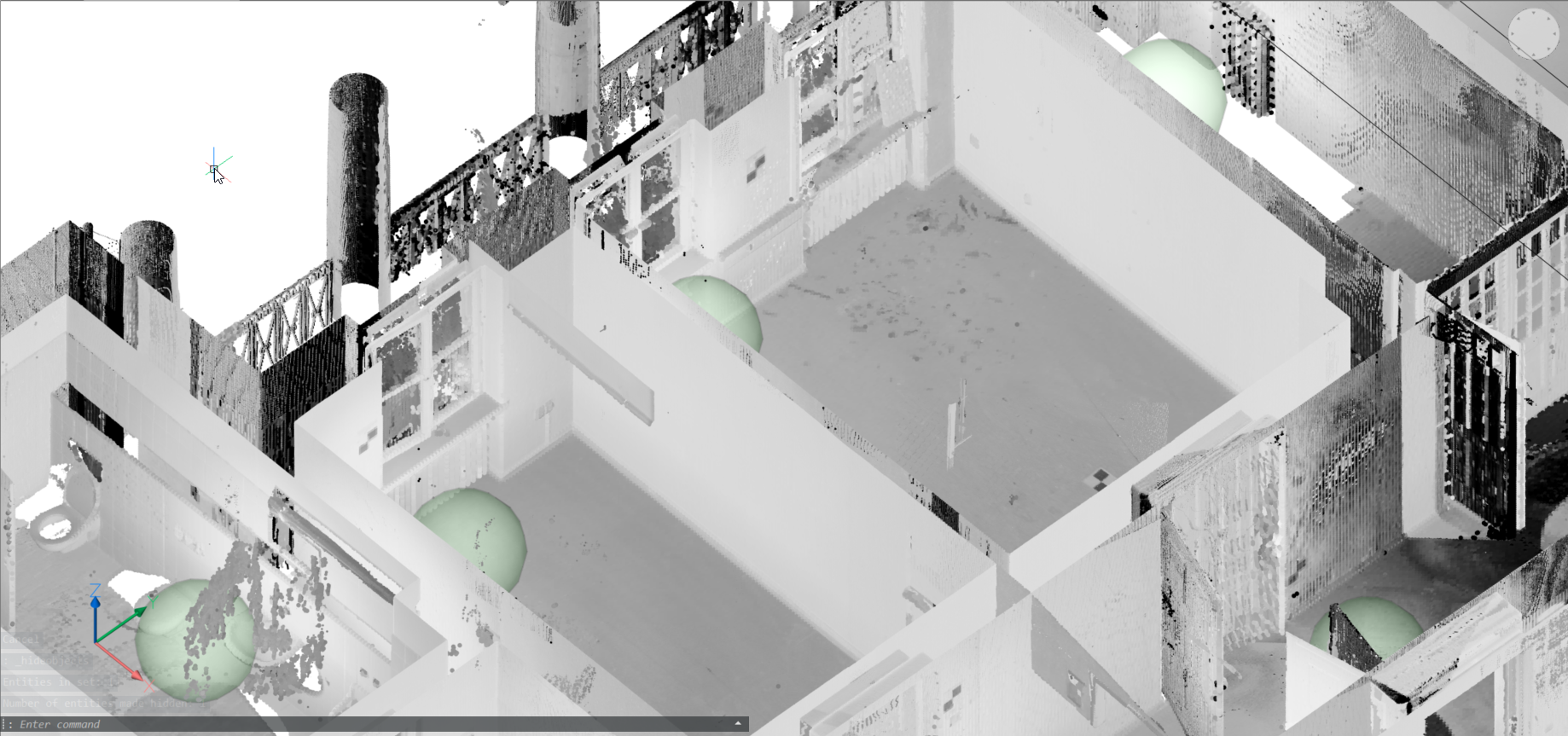
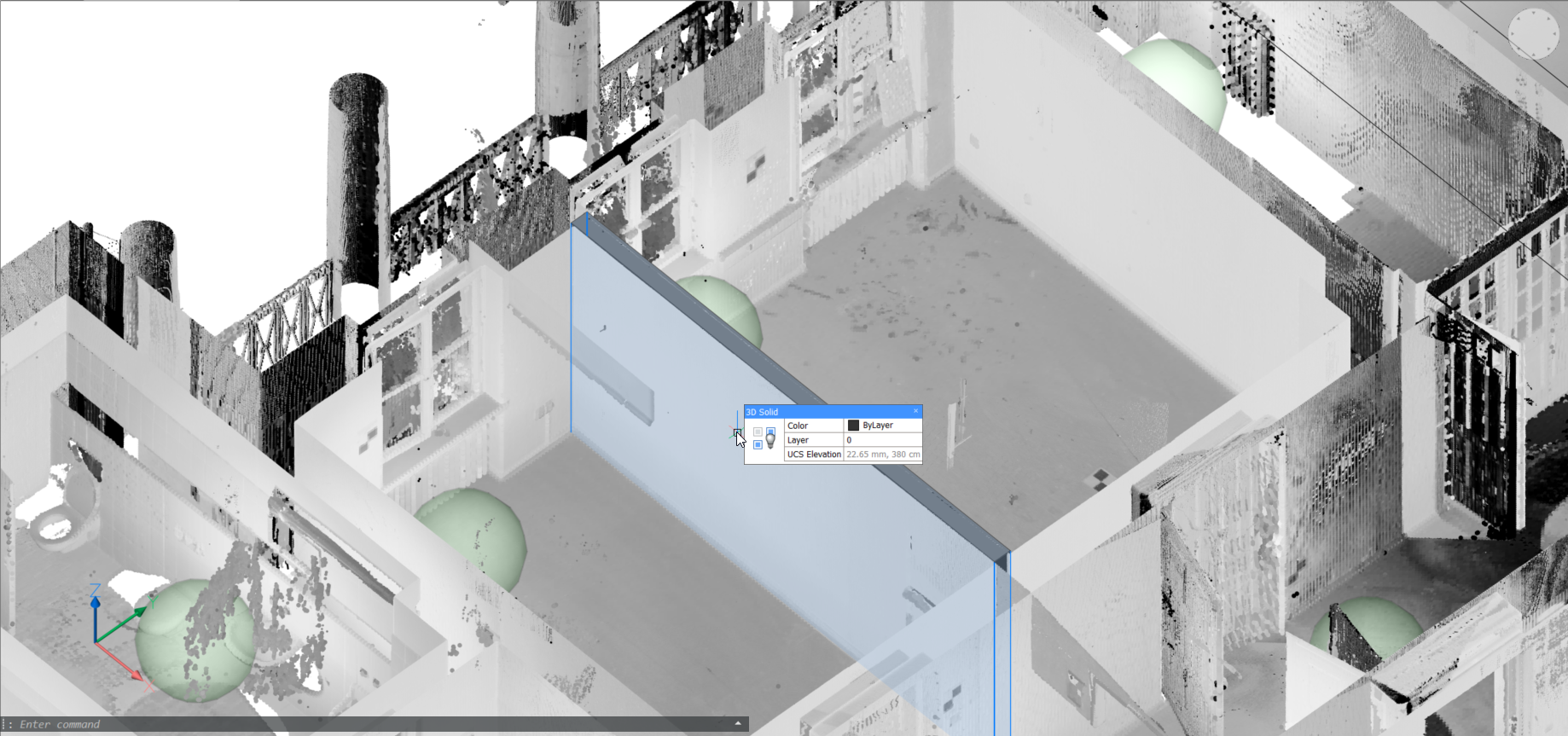
地板检测
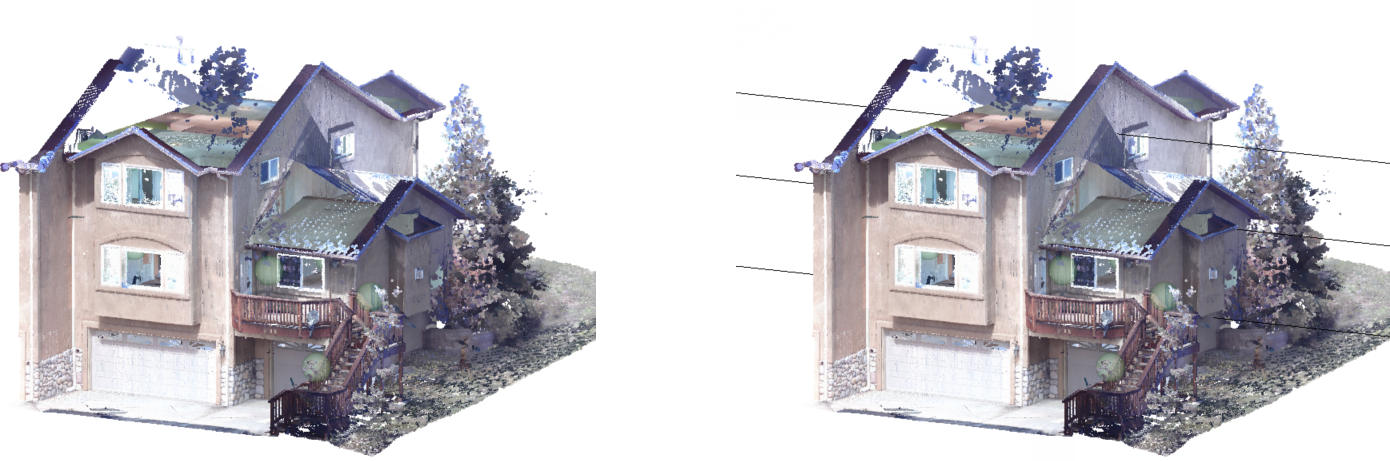
剖面也适用于点云,它们可用于显示点云的一部分。点云裁剪和截面平面之间的区别在于,点云裁剪仅裁剪点云,而截面平面将裁剪图形中的所有几何图形。
新的POINTCLOUDDETECTFLOORS命令为在代表建筑物的点云中找到的每个楼层生成体积截面。检测基于具有相似 Z 坐标的点区域。生成的体积部分可以帮助导航建筑物的点云。
平面拟合
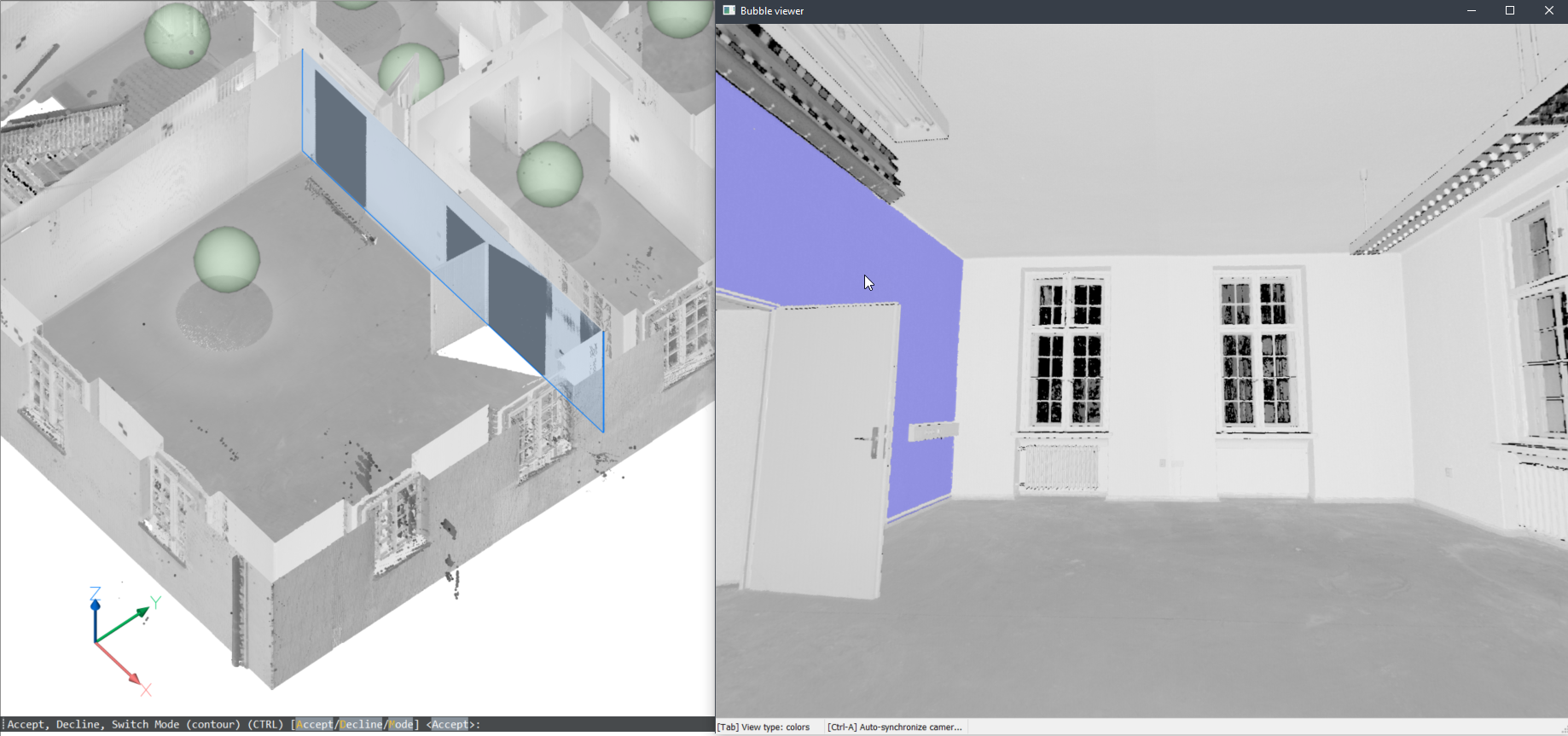
新的POINTCLOUDFITPLANAR命令使您能够基于点云创建 3d 几何体。在点云中选择一个点后,它将创建一个平面或实体。看起来在一个平面上的点永远不会完全在一个平面上,因此阈值被设置为点云实体的一个属性。这也适用于气泡视图。
在气泡视图中
如果在启动命令之前气泡查看器已打开,BricsCAD 期望您在气泡查看器中进行选择。光标将为您提供平面方向的预览。当您单击时,您将在气泡视图和模型视图中获得预览。您可以使用 CTRL 键在 2 个形状表示之间切换。
在模型空间中
当气泡查看器未打开时,您也可以在模型空间中使用此命令。BricsCAD 会要求您在模型空间中选择点云的一个点。根据裁剪点云的大小,它需要更多时间,但通过搜索多个扫描位置有两个优点:
- 它可以创建更大的表面,其中每个扫描位置只能看到零件
- 它可以检测墙壁和楼板的厚度,因为它可以考虑相对的表面。
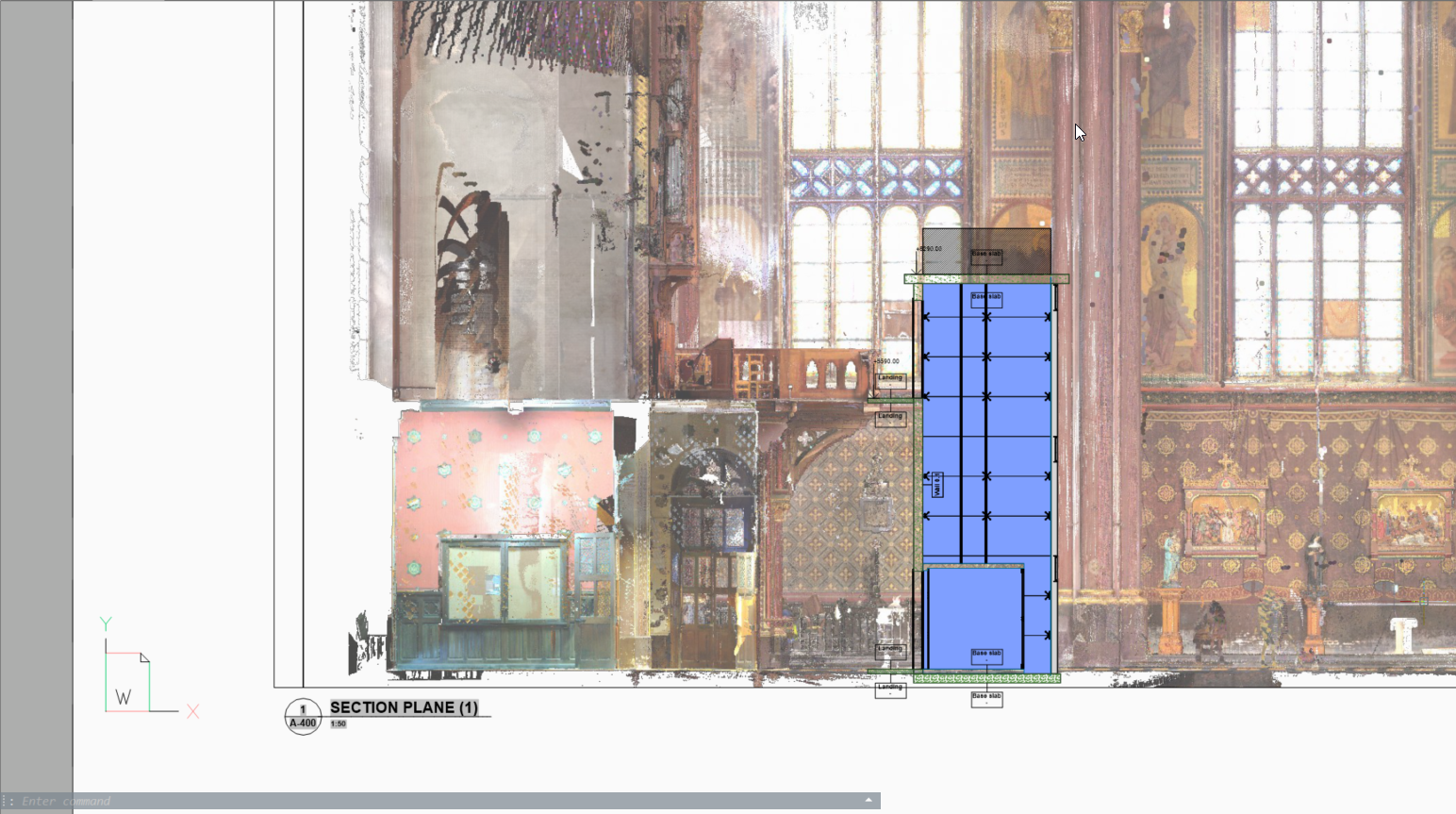
点云投影
新的POINTCLOUDPROJECTSECTION命令使您能够根据各种墙检测选项从点云的体积部分检测墙。您可以为建筑物中的每个楼层自动创建体积截面。您可以使用这些部分来生成二维线以创建二维平面图或垂直部分。这是一个后台进程,可以在一个队列中处理多个部分。这样就可以在所有部分以全分辨率运行此命令。
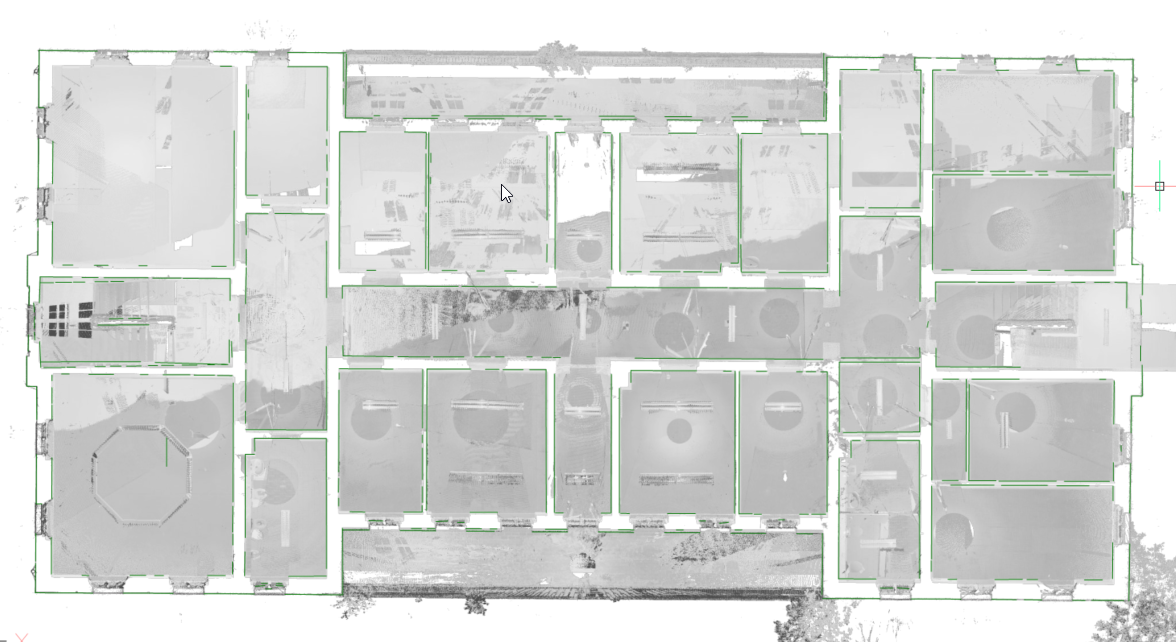
同时,将生成光栅图像。在某些情况下,没有必要重新创建现有建筑物。背景图像可以为设计文档提供更多上下文。这些可用于验证创建的 2d 几何图形,但在高质量扫描中,这些图像也可用作图形材料。例如,作为对历史建筑进行现代干预的改造项目中 BIM 模型的背景图像。