命令:PointCloud, PointCloudAlign, PointCloudAttach, -PointCloudAttach, PointCloudColorMap, PointCloudCrop, PointCloudCropSolid, PointCloudDeleteItem, PointCloudDetectFloors, PointCloudExport, PointCloudFitPlanar, PointCloudImport, PointCloudPointSize, PointCloudPointSize_Minus, PointCloudPointSize_Plus, PointCloudPointMax, PointCloudPreprocess, -PointCloudPreprocess, PointCloudProjectSection, PointCloudReference, PointCloudShowBubbles, PointCloudUncrop
THCAD中的点云功能明显更快、更强大,并且在 BIM 许可下更加强大。
预处理
E57 文件格式被添加到支持的文件中进行预处理。
...
点云的预处理、管理和附加
要预处理点云,请使用POINTCLOUDREFERENCE命令打开点云缓存管理器对话框,然后选择处理文件或处理文件夹。你也可以使用POINTCLOUDATTAC命令。
你可以从保存或未保存的DWG文件开始预处理点云。你被要求输入点云(没有单位或插入点)。
所有数据都被读取、处理并写入磁盘,并创建一个LOG文件。进度会被跟踪并在点云缓存管理器对话框中显示。
点云预处理有两个步骤。第一步是处理这些点,第二步是视觉优化。
注意:一些不寻常的点云输入文件,如具有非标准列布局或非标准地理标签的 LAS 文件,不会自动正确进行预处理。不过,THCAD®安装文件夹中还有一个shell可执行预处理器(preprocessor.exe),允许你指定非标准的列布局和/或地理标签(-w skip)。shell预处理器在底层使用相同的库,但它会暴露一些THCAD®不会自动使用的手动选项。要了解选项,可以在作系统壳中运行无参数的预处理器可执行文件。使用摘要将被打印出来。欲了解更多详细信息,请参阅《如何使用preprocessor.exe在预处理非标准的.LAS, .LAZ 点云数据时忽略GeoTIFF标签》。
点云文件和360度图像几乎即时在图纸中可用,气泡以紫色显示。这些气泡不包含法线和点数深度等信息。气泡预处理会在后台继续进行,直到所有信息准备好。气泡随后以绿色显示。
预处理的进度会被记录在与点云相关的子文件夹中的日志文件中。该子文件夹位于当前点云缓存路径内(可在 POINTCLOUDCACHEFOLDER 系统变量中设置)。当前点云缓存的默认路径是 C:\Users\%username%\AppData\Roaming\THys\THCAD\V26x64\en_US\PointCloudCache\Folder_for_processed_pointcloud。
注意:日志文件主要用于故障排除。您可以在点云缓存管理器对话框中跟踪预处理的进展。
要管理预处理的点云,可以使用点云缓存管理器对话框:
- 搜索文件或用顶部的搜索栏筛选缓存点云列表。
- 在详情部分,查看所选点云的所有元数据。
- 你可以编辑数据名称、单位和GIS坐标系。
注意:任何包含先前预处理的点云缓存数据(来自其他THCAD®点云缓存文件夹或用shell可执行文件preprocessor.exe预处理过)的子文件夹,都可以复制到POINTCLOUDCACHEFOLDER系统变量指定的文件夹中(默认值:C:\Users\%username%\AppData\Roaming\THys\THCAD\V26x64\en_US\PointCloudCache),下次打开点云缓存管理器时即可访问。对于点云缓存文件夹中的每个子文件夹,点云缓存管理器对话框中都有一个项目。
要开始连接缓存点云,请使用“附加”按钮。“连接点云”对话框打开。在这里,你可以设置点云实例的插入点、比例尺、旋转、单位和GIS坐标系。你也可以决定使用地理数据(如果有的话)。
对齐
新的 POINTCLOUDALIGN 命令会自动旋转点云以使其与 X 轴和 Y 轴最佳对齐。为了确定最佳对齐方式,它可以分析整个点云,或者您可以指定最相关的区域。

气泡查看器
点云在所有扫描位置显示气泡。在这些位置,您将体验到最真实的视觉表现。

双击模型空间中的气泡之一以打开气泡查看器。您可以按下鼠标中键并移动鼠标以从该扫描位置的任何方向查看点云。


按 Tab 键可在三种不同的视觉模式之间循环。
第一种模式将点显示为其实际颜色或灰度,具体取决于数据的扫描方式。

第二种模式根据它们的法向量将点显示为红色、绿色或蓝色。颜色对应于 UCS 轴。


第三种模式随着与扫描位置的距离增加而显示从亮到暗的点。

您可以通过按 Ctrl A 轻松同步绘图视图以匹配气泡查看器。
实体捕捉
新的点云最近点实体捕捉显著提高了您选择相关点云点的能力。它使用从当前视点朝向光标的假想圆柱体。

假想圆柱体的半径由实体捕捉孔径框设置定义。
在实体捕捉菜单、工具栏和设置中启用新的点云最近点实体捕捉以及其他 3D 实体捕捉。
导出
新的 POINTCLOUDEXPORT 命令允许您将点云的裁剪选择导出到 .pts 文件。
地板检测
剖面也适用于点云,它们可用于显示点云的一部分。点云裁剪和截面平面之间的区别在于,点云裁剪仅裁剪点云,而截面平面将裁剪图形中的所有几何图形。
新的POINTCLOUDDETECTFLOORS命令为在代表建筑物的点云中找到的每个楼层生成体积截面。检测基于具有相似 Z 坐标的点区域。生成的体积部分可以帮助导航建筑物的点云。

平面拟合
新的POINTCLOUDFITPLANAR命令使您能够基于点云创建 3d 几何体。在点云中选择一个点后,它将创建一个平面或实体。看起来在一个平面上的点永远不会完全在一个平面上,因此阈值被设置为点云实体的一个属性。这也适用于气泡视图。
在气泡视图中
如果在启动命令之前气泡查看器已打开,THCAD 期望您在气泡查看器中进行选择。光标将为您提供平面方向的预览。当您单击时,您将在气泡视图和模型视图中获得预览。您可以使用 CTRL 键在 2 个形状表示之间切换。


在模型空间中
当气泡查看器未打开时,您也可以在模型空间中使用此命令。THCAD 会要求您在模型空间中选择点云的一个点。根据裁剪点云的大小,它需要更多时间,但通过搜索多个扫描位置有两个优点:
- 它可以创建更大的表面,其中每个扫描位置只能看到零件
- 它可以检测墙壁和楼板的厚度,因为它可以考虑相对的表面。
点云投影
新的POINTCLOUDPROJECTSECTION命令使您能够根据各种墙检测选项从点云的体积部分检测墙。您可以为建筑物中的每个楼层自动创建体积截面。您可以使用这些部分来生成二维线以创建二维平面图或垂直部分。这是一个后台进程,可以在一个队列中处理多个部分。这样就可以在所有部分以全分辨率运行此命令。

同时,将生成光栅图像。在某些情况下,没有必要重新创建现有建筑物。背景图像可以为设计文档提供更多上下文。这些可用于验证创建的 2d 几何图形,但在高质量扫描中,这些图像也可用作图形材料。例如,作为对历史建筑进行现代干预的改造项目中 BIM 模型的背景图像。
轴最佳对齐,同时考虑点云中的垂直平面面(如墙体)。为了确定最佳对齐方式,你需要指定包含墙体的点云中最相关的区域。

气泡查看器
根据点云的原始文件格式以及扫描时使用的扫描器类型(静态或运动学),气泡(绿色球体)或航点(蓝色球体)可能会在所有扫描点显示。在这些地点,你可以通过打开气泡查看器体验最逼真的视觉表现。
打开气泡查看器:
- 运行POINTCLOUDBUBBLEVIEWER命令。
- 从点云管理器面板的扫描或航点列表中列出的扫描或航点的右键菜单中选择“在气泡中打开扫描”选项。
注意:LAS和PTS格式不包含扫描仪信息,因此无法产生点云气泡。
结构化数据通过静态扫描仪捕获。在这种情况下,扫描仪的位置对每个点都是已知的。扫描点在静态扫描器位置会生成绿色气泡。
注意:气泡具有深度信息,可用于拟合平面和拟合圆柱等算法(详见本文气泡部分的平面拟合和拟合圆柱)。
非结构化数据则使用运动学扫描仪捕获。在这种情况下,没有确切的扫描点位置。部分运动学扫描仪在特定时间间隔生成全景图像。对于这些图像,位置已知,并生成航点(蓝色球体)。
注意:航点是根据捕获的图像创建的,这些图像没有深度信息。它们仅具备可视化功能,无法用于其他算法。
注意:在点云管理器的渲染设置标签页中更改显示气泡的大小。从这里你还可以关闭模型空间和气泡查看器中点云气泡的显示。对于裁剪的点云,你可以选择只显示未裁剪的气泡(参见点云管理器面板文章)。
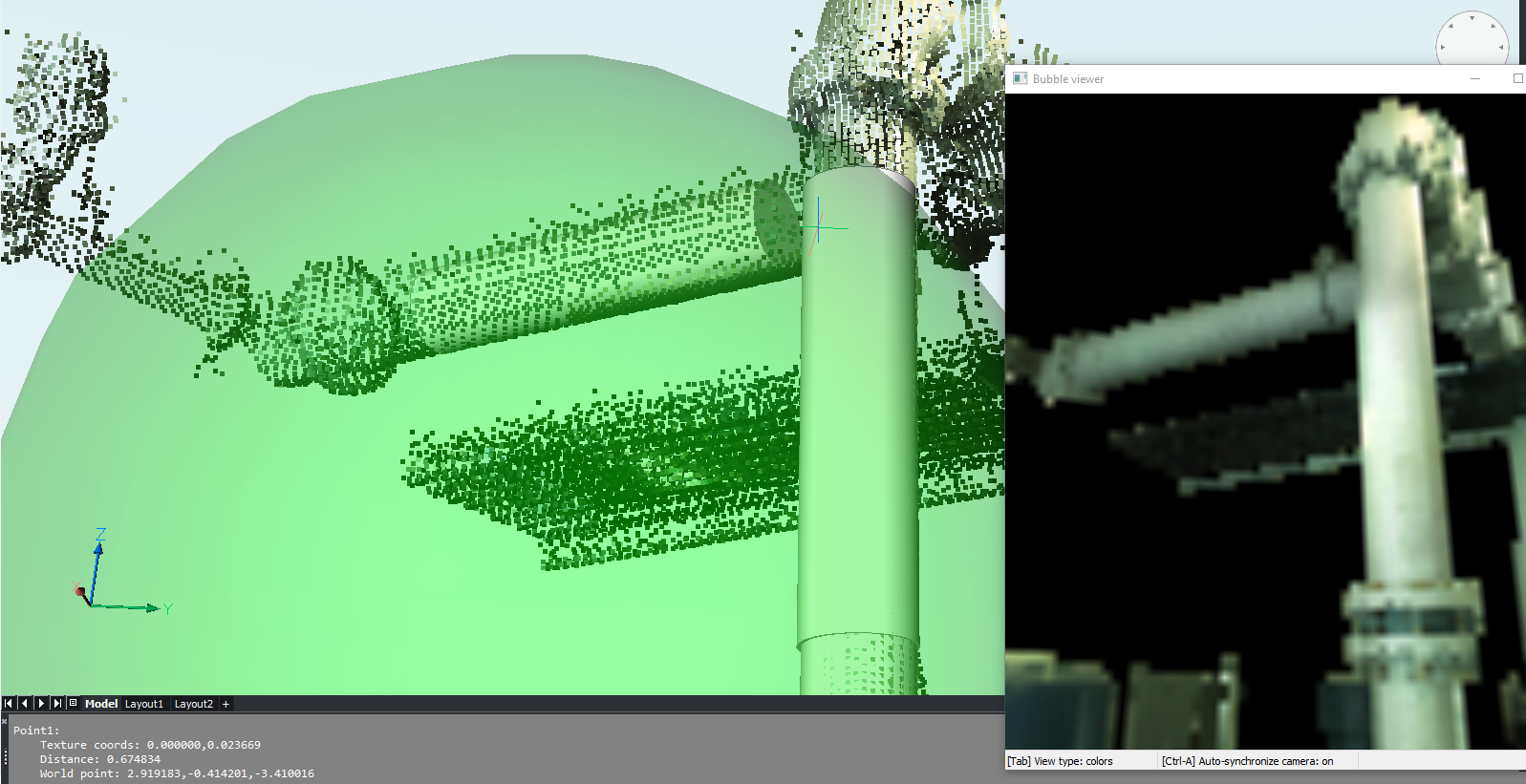
在 POINTCLOUDBUBBLEVIEWER 命令中指定气泡索引,或双击模型空间中的一个气泡即可打开气泡查看器。
按住鼠标中键并移动鼠标,可以从该扫描位置向任意方向查看点云。
用鼠标滚轮放大缩小。
附近的扫描在气泡查看器中由红色气泡指示。将光标悬停在气泡上以显示扫描名称。连按气泡以在检视器中打开扫描。

按 Tab 键可在三种不同的视觉模式(视图类型)之间循环。
颜色和颜色(深度)模式将点显示为实际颜色或灰度,具体取决于数据的扫描方式。
法线模式根据点的法线向量将点显示为红色、绿色或蓝色。颜色对应于 UCS 轴。
随着与扫描位置的距离增加,距离模式显示从亮到暗的点。
按 Ctrl A 同步绘图视图以匹配气泡查看器。

注意: 在提示选择点的命令中,比如(多边)线,你可以用气泡查看器吸附点云点。
实体捕捉
点云最近点实体吸附(PCNEAREST command/3DOSMODE 系统变量)显著提升了选择相关点云点的能力。它使用从当前视点朝向光标的假想圆柱体。

假想圆柱体的半径由实体捕捉孔径框(APBOX系统变量)设置定义。
注意:结果是虚数圆柱内最接近相机的点。
在实体吸附菜单、工具栏和设置中,打开点云最近点的实体吸附(3DOSMODE 系统变量的位码 124)以及其他 3D 实体吸附。
注意:确保未选中 3DOSMODE 系统变量的位码 1(关闭所有 3D 捕捉)。
导出
POINTCLOUDEXPORT 命令允许您将点云的可见部分导出到 PTS、HSPC 或 LAZ 文件。
楼层检测
POINTCLOUDDETECTFLOORS 命令检测建筑物点云中的楼层。检测基于具有相似 Z 坐标的点区域。检测到的楼层可以帮助导航建筑物的点云。

注意:
- 为了更好地进行楼层检测,可以隐藏与建筑物无关的点(环境、其他建筑等)。你可以使用点云命令,比如POINTCLOUDCROP、POINTCLOUDREGION、POINTCLOUDCLASSIFY。关闭 点云管理器面板中无关类别的可见性。
- POINTCLOUDDETECTFLOORS 命令作为点云扫描到 BIM 工作流程中的一步使用。请参阅“点云扫描到BIM工作流程”一文。
点云投影
POINTCLOUDPROJECTSECTION 命令允许您根据各种墙检测选项从点云的体积部分检测墙。您可以使用BIMSECTION命令创建体积剖面。您可以使用这些剖面生成二维线,以创建二维平面图或垂直剖面。这是一个后台进程,可以在队列中处理多个部分。这样,就可以在所有部分上以全分辨率运行此命令。
同时,生成光栅图像以为用户提供一些上下文。在某些情况下,没有必要重新创建现有建筑物。背景图像可以为设计文档提供更多背景信息。这些可用于验证创建的 2D 几何体,但在高质量扫描中,这些图像也可以用作图形材料。例如,在对历史建筑进行现代干预的改造项目中,作为 BIM 模型的背景图像。

平面拟合
POINTCLOUDFITPLANAR 命令使您能够基于点云创建 3D 几何体。它在点云中选择种子点后创建平面表面或实体。为了检测与种子点位于同一平面上的点,使用了一个阈值,该阈值可以设置为点云实体的属性。通过按住 Shift 键并选择房间的相邻墙壁,将延伸/修剪拟合的平面以形成封闭的曲面。
注意:
- 选择开启功能允许你考虑门窗的开启(仅限气泡查看器中)。
- 调整边界功能可以让你调整平面边界轮廓。
- 缝合曲面提供将多个拟合平面的结果缝合到实体中,例如,该实体稍后可以与 BIMINVERTSPACES 命令一起使用。
在气泡视图中
如果启动命令时气泡查看器打开,则BricsCAD®希望您在气泡查看器中选择平面种子点。光标可预览平面的法线方向。接下来,您可以在气泡查看器和模型视图中获得预览。您可以使用 Ctrl 键在两个形状表示之间切换。
注意:当仍处于选择模式时,气泡中的相应点显示为紫色。一旦用户接受生成的结果,这些点将显示为绿色。
在模型空间中
当气泡查看器未打开时,您也可以在模型空间中使用此命令。THCAD® 要求您在模型空间中选择点云的一个点。根据点云可见部分的大小,与在气泡查看器中运行命令相比,这可能需要更多时间。但是,通过搜索多个扫描位置,这有两个优点:
- 它可以通过组合不同扫描的部分来创建更大的表面。
- 它可以检测壁和板的厚度。


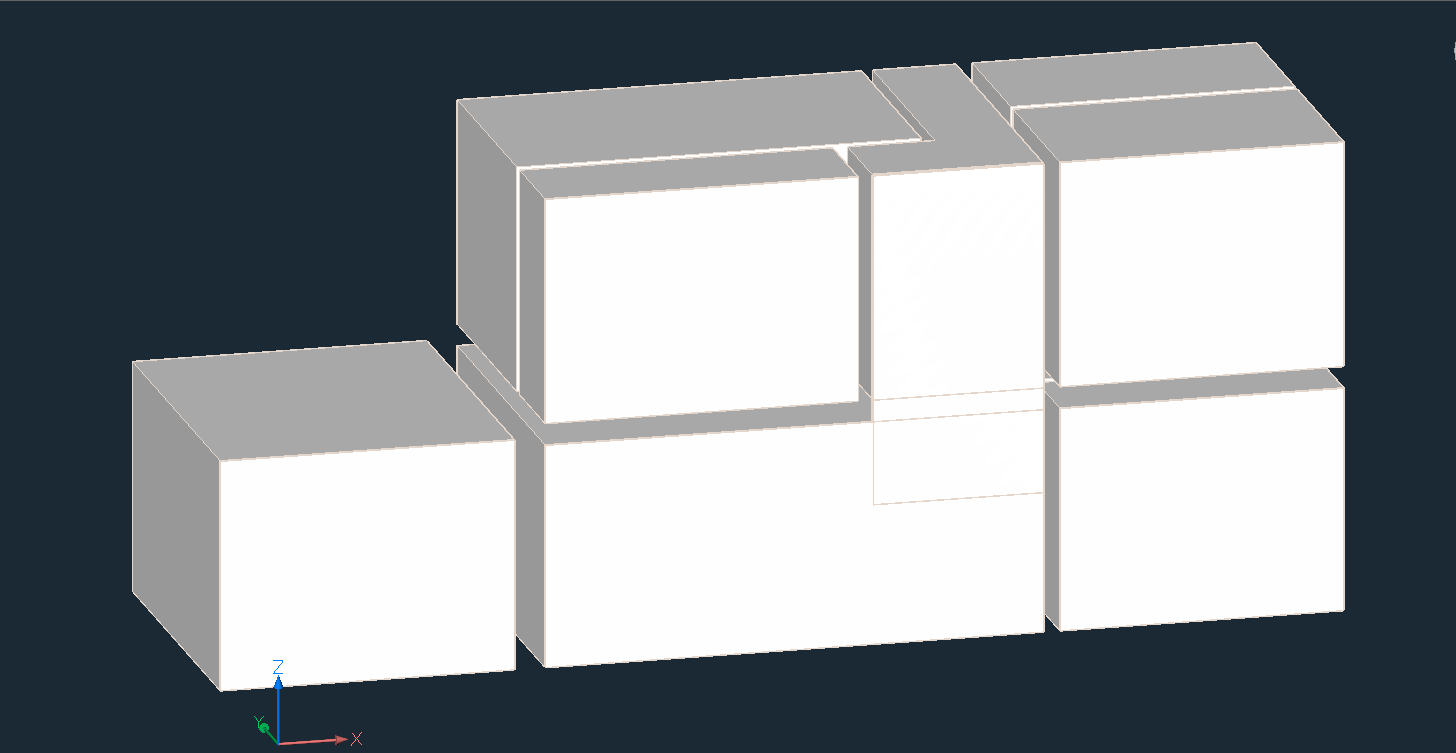
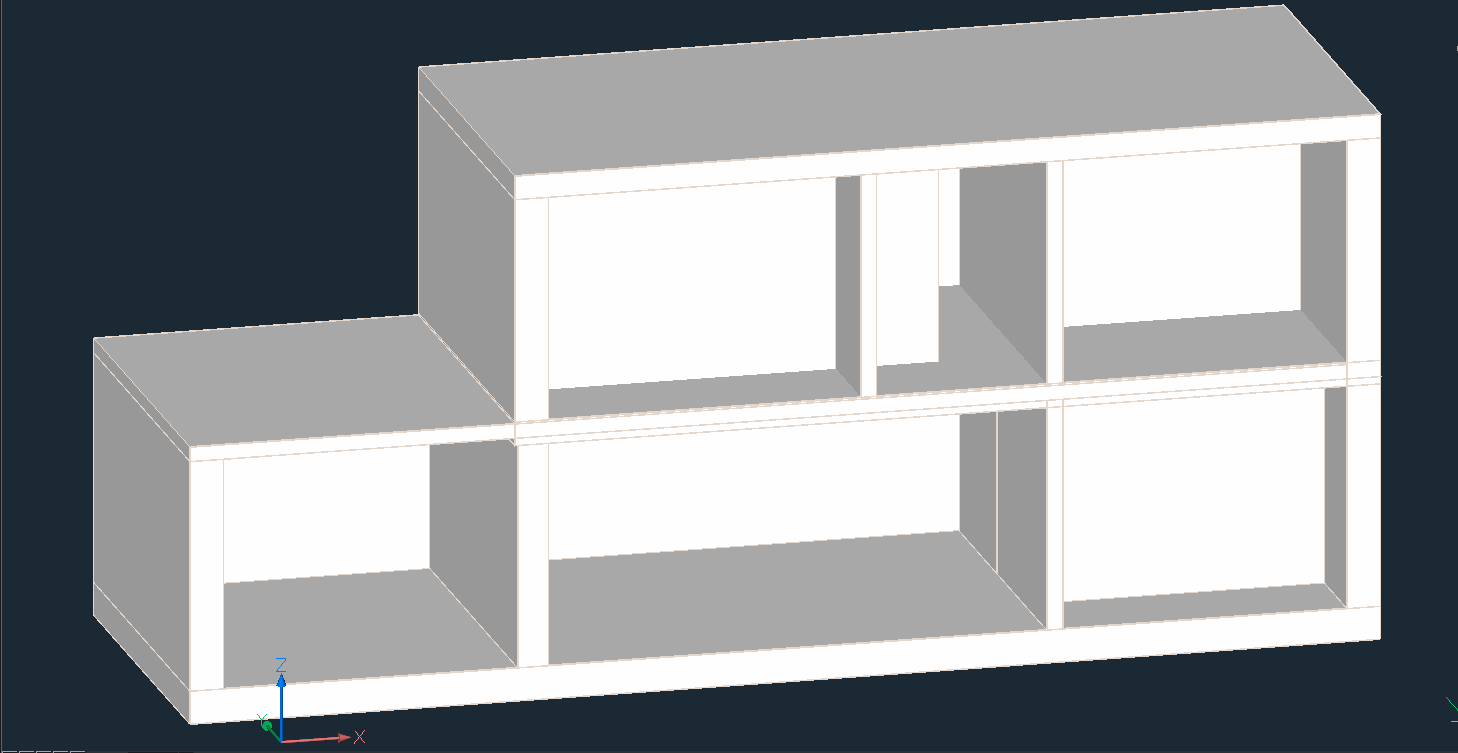
注意:这里提供了将扫描转换为建筑模型的工作流程。点云(上图)首先被转换为一组实体,每个房间一个,使用拼接的POINTCLOUDFITPLANAR结果(中间图)。命令 BIMINVERTSPACES 将这些临时房间实体转换为带有墙体和板块的建筑模型,源自这些实体的反转。

在气泡中拟合圆柱体
通过在气泡查看器中使用 POINTCLOUDFITCYLINDER 命令,您可以将圆柱体拟合到点云的圆柱形部分(例如管道)。需要在气泡查看器中沿圆柱轴单击两次才能提取圆柱体(在模型视图中创建实体)。
点云偏差
- POINTCLOUDDEVIATION 允许您直观地评估平面结构与点云点之间的拟合。

房屋楼板和拟合平面的点云剖面:
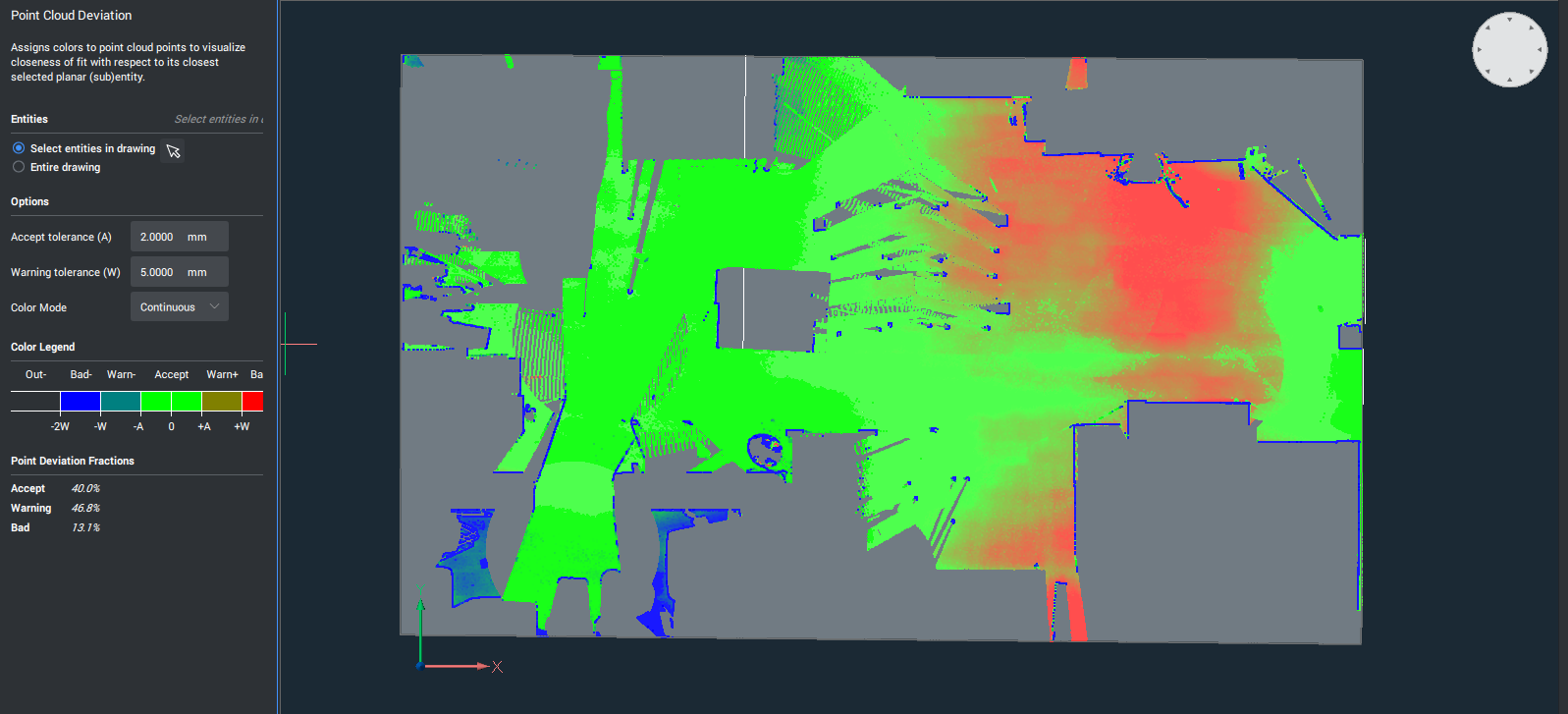
使用颜色图可视化点从地板到拟合平面的距离。在左侧面板中,提供了颜色的解释(绿色是平面的,这里从绿色到蓝色的渐变在平面上方,从绿色到红色的渐变在平面下方)。此外,还总结了所属类别的点百分比(确定,警告级别,......